
Force Sensorless Impedance Control for 7DOF Manipulator by Extended State Estimator
(2019.03 ~ 2019.11, ETRI)

Force Sensorless Impedance Control
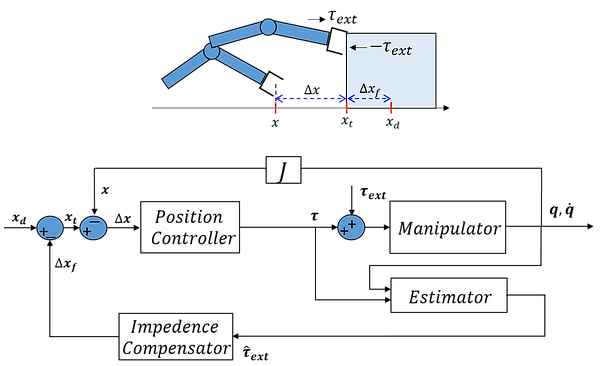
In order to estimate the external force of the manipulator, we study estimation methods based on the mathematical dynamic model of the robot without cameras and force sensors. Firstly, we obtain the exact mathematical model of the 7 degree of freedom (DOF) robot and use it for torque control in real time. Then, we propose a new extended state estimator to distinguish the friction torque and the external force.
Robust cyber-physical system control against cyber attacks using a sampled-data approach
(2019.06 ~ 2023.06, NRF)

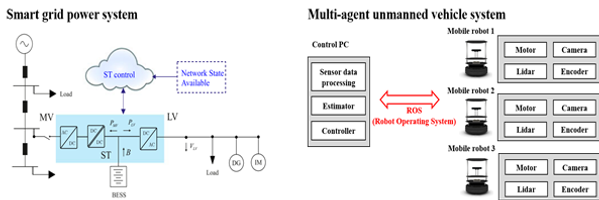
Cyber-physical systems are widely used in many areas such as smart grid, autonomous vehicle, drone, mobile robot, power plant, smart factory so on. In the present and future automated physical environment, it is significantly important to develop the robust cyber physical systems against cyber attacks so as to protect the property and human life. Thus, to withstand the cyber attacks, this study presents mathematical methods for cyber-physical control system design based on sampled-data approach, and the proposed methods are applied to multi-agent unmanned vehicle and smart grid power systems in order to verify the effectiveness of the presented methods.